| |
 |
|
 |
 |
The execution engine combines Altaira's primary user interface with its ruleset interpreter. It is responsible for obtaining sensor inputs, enabling and firing rules and maintaining the map. Additional information regarding the background of the Execution Engine, is available in Altaira: A Rule-based Visual Language for Small Mobile Robots; 3.2 Execution Engine.
Click on the
icons below for information regarding screen functionality.
|
| |
|
|
|
|
|
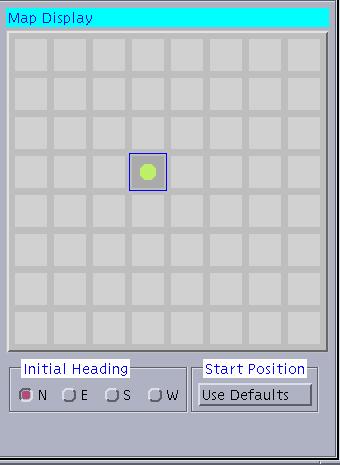
The Execution Enigin window should remain open when Altaira is in use.
As the robot explores a map, the results of where the robot has been
is displayed in the map area of the Execution Engine. Likewize,
the current sensor readings are displayed as well as the current
direction, motor settings and navigation.
Quit from the execution engine file menu. See also,
Altaira:
A Rule-based Visual Language for Small Mobile Robots;
3.5 Termination